誰でも分かる自動運転②

前回は、「自動運転って何?」「自動運転レベル」「自動運転の課題」を説明しました。
今回は課題に対する現状の動きを説明していきます。
自動運転の課題解消に向けた対策と現状
【課題1】 自動運転車が事故を発生した場合の責任区分に関して。
【対策・現状1】
日本では、2020年4月に道路交通法で、公道でレベル3※までの自動運転走行が可能となっています。
※レベル1,2は運転手主体。レベル3は自動運転システムが主体だが、特定条件下(場所、天候、速度など自動運転が安全に走行できる条件下)における自動運転。
レベル3では、システムからの要請があれば運転手が対応することが必須となり、事故の責任は基本運転手となります。ただし、整備不良車両の場合は、車両メーカーもしくは、システム開発メーカーの責任区分になります。特定条件下ではない道路の場合は、従来のルールが適応されます。
尚、2023年4月1日に許可制の「特定自動運行」として施行される見通しと前回記事に記載しましたが、「都道府県公安委員会の事前許可(各種条件、計画の提出)」「特定自動運行主任者の配置(車両に運転手のいない場合は、遠隔監視が必須)」が必要となります。
完全自動運転社会の実現には、国や企業で明確なルール、責任区分を定義することが急務ですが、世界でも各国でのルールで分かれており、SAE(米国自動車技術会)の自動運転レベルが標準として定義されているように、国際的な道路交通条約の定義及び、合意が必要となります。
【課題2】 自動運転車のセキュリティに関して。
【対策・現状2】
国土交通省の自動運転車の安全技術ガイドラインを参照
自動運転車は、高精度3次元地図情報、交通情報、信号情報等の運行に必要な情報に係る通信のほか、運行管理センターからの遠隔監視のための通信、ECU(Electronic Control Unit)の制御プログラムや自動運転ソフトを無線通信によりアップデートする OTA(Over The Air)など、最新のデータやプログラムを無線通信で取得することを前提として自動運転システムが安全に機能することが必要です。
このため、ネットワークに接続したコネクテッドカーである自動運転車の安全確保の観点から、サイバー攻撃に対するセキュリティ対策を講じることが不可欠となります。
自動車製作者等又は自動運転車を用いた移動サービスのシステム提供者は、サイバーセキュリティに関する国連(WP29)等の最新の要件※を踏まえ、自動運転車のハッキング対策等のサイバーセキュリティを考慮した車両の設計・開発を行うことが必要となります。
※要件:平成29年3月に国連で成立したサイバーセキュリティガイドライン等で示されている要件の例
・自動運転車の接続及び通信の安全確保
・車外のネットワークから車内の制御系ネットワークが影響を受けないこと
・システムの機能不全時の「セーフモード」を備えること
・不正操作を検知したときは、運転者に警告の上、車両を安全にコントロールすること
上記要件を満たすセキュリティ環境を構築して提供することが必須となります。
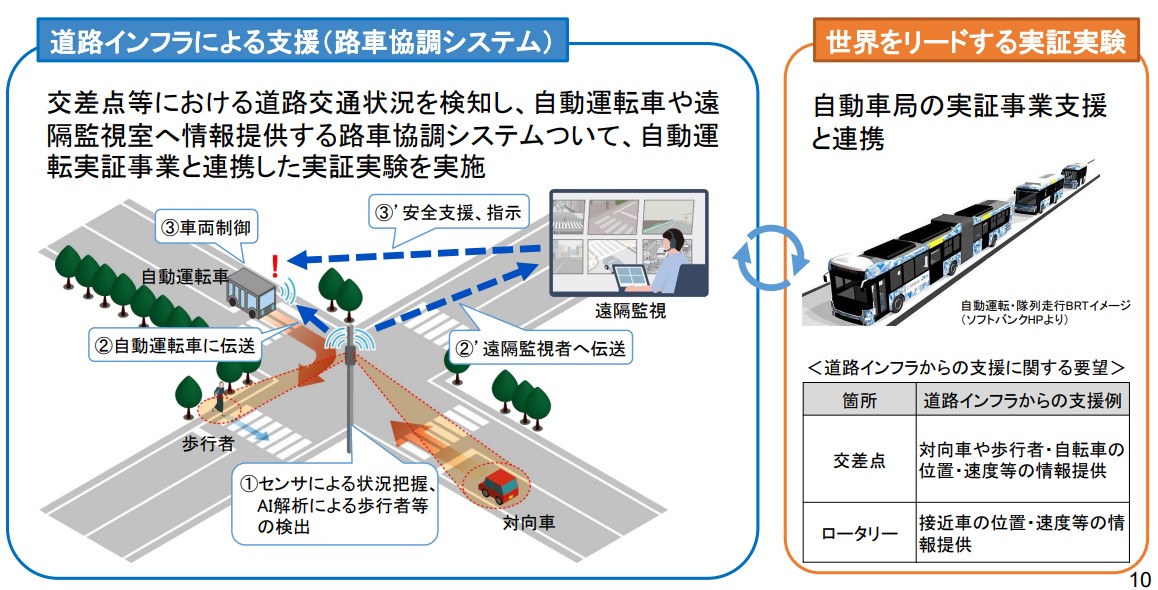
【課題3】 インフラの整備に関して。
【対策・現状3】
信号、工事、事故、通行規制、路面、渋滞、その他様々な環境情報とも自動運転は連携が必要となります。自動運転車が感知できない地物、地形でのセンシングでは道路上に設置した路側機(Roar Side Unit)との連携もレベル4以上では欠かせません。
自動運転専用道路であれば、これらの諸条件は軽減されますが、レベル5の完全自動運転の場合は、全道路に専用レーンが必要となるため、現実的ではありません。自動運転には磁気マーカーを使用したシステムもありますが、これも全道路を対象とするのは同様に厳しいと考えます(限定ルート、狭い道路や、停車ポイントでは有効)。
現在、全国では様々な観点での実証実験が行われ、一部自治体では定常運用をしています。各企業でもカメラ・センサー機器、路側機など開発、改良に取り組んでいますが、やはり国を中心に道路環境の整備が必須となり、既存のVICSのような受動情報から、双方向情報通信や、道路白線の整備、信号・路側機との連携による対策も技術や法整備と併せ急務であると考えられます。
※国土交通省資料抜粋
【課題4】 高精度3次元地図の整備に関して。
【対策・現状4】
自動車の運転は「認知」「判断」「操作」の3要素で成り立っており、自動運転でも同様となります。高精度3次元地図は、「認知」と「判断」の分野で利用されており、自動運転では欠かせないものとなり、日々開発され高精度化が進んでいます。一般的にダイナミックマップとも呼ばれており、車両に搭載したセンサーで得られる情報を基に地図データと合わせ位置を特定するものとなります。
高精度3次元地図の作成には、高価な測定機器に加え、データの加工など時間と費用がかなり必要となり、全ての道路の情報取得と更新は現実的ではないのが現状となります。
各企業では、地図データ作成の効率化(AI連携、自動化)を進め、コスト低減を図る取り組みを進めています。
次回は自動運転での現在の取り組み事例を説明していきます。
トップ画像:(出典)官民ITS構想・ロードマップ これまでの取組と今後のITS構想の基本的考え方
▼前回までの記事
誰でも分かる自動運転①

名古屋大学 工学研究科 情報・通信工学専攻 教授(未来社会創造機構モビリティ社会研究所 副所長)
TMI (超学際移動イノベーション)卓越大学院 コーディネータ
自動運転ベンチャー (株) ティアフォー フェロー
NPO法人位置情報サービス研究機構(Lisra) 代表理事
総務省スマートIoT推進フォーラム テストベッド分科会長
中部地方測量部 地理空間情報産学官中部地区連絡協議会 委員
CODE for Nagoya 名誉代表
UDC2020愛知ブロック 代表
名古屋大学 工学研究科 情報・通信工学専攻 教授(未来社会創造機構モビリティ社会研究所 副所長)
TMI (超学際移動イノベーション)卓越大学院 コーディネータ
自動運転ベンチャー (株) ティアフォー フェロー
NPO法人位置情報サービス研究機構(Lisra) 代表理事
総務省スマートIoT推進フォーラム テストベッド分科会長
中部地方測量部 地理空間情報産学官中部地区連絡協議会 委員
CODE for Nagoya 名誉代表
UDC2020愛知ブロック 代表
JOIN NEWSME ニュースレター購読
月に1回、newsMEのトピックスをメールで配信しています!
登録解除も簡単です。ぜひお気軽にご購読ください
KCMEの革新的な技術情報を随時発信
5G・IoT・クラウド・セキュリティ・AIなどの注目領域のコンテンツをお届けします。
KCME注目の技術領域に関するテックブログを配信しています。
KCME注目の技術領域に関するテックブログを配信しています。
RELATED ARTICLE 関連記事
HOT TAG 注目タグ
RANKING 閲覧ランキング
-
 介護IT
介護IT80歳を超えても元気でつながりあえるまちへ! 徳島県小松島市ー認知症予防への取り組み【前編】
-
 介護IT
介護IT80歳を超えても元気でつながりあえるまちへ! 徳島県小松島市ー認知症予防への取り組み【後編】
-
 介護IT
介護IT脳の健康維持と促進を目指した鳥取県智頭町様との取り組み
-
 介護IT 【インタビュイー(回答者)】井上創造
介護IT 【インタビュイー(回答者)】井上創造IoTとビッグデータで解決できる介護の悩み <第1回>
-
 自動運転 【記事監修】河口信夫
自動運転 【記事監修】河口信夫誰でも分かる自動運転①
-
 介護IT
介護IT認知症予防のために何ができるのか? ~日本認知症予防学会で学ぶ~
-
 クラウド
クラウド「SmartBee」開発者による技術コラム
-
 データアナリティクス
データアナリティクスセルフサービスデータ分析ツール「Alteryx」の技術ブログ
-
 データアナリティクス
データアナリティクスデータを見て理解することを支援する「Tableau」の技術ブログ
-
自動運転 【記事監修】河口信夫
誰でも分かる自動運転②